隨著微服務架構的廣泛應用,服務治理已成為保障分布式系統穩定、高效運行的核心環節。它涵蓋服務的注冊與發現、配置管理、負載均衡、熔斷降級、動態路由等多個方面,旨在提升系統的可觀測性、可控性與韌性。本文將重點探討服務治理中三個關鍵組成部分:注冊中心、配置管理以及OpenFeign客戶端在服務調用層面的治理實踐,解析它們如何協同工作,構建健壯的微服務體系。
一、注冊中心:服務的“電話簿”與“導航系統”
注冊中心是服務治理的基石,扮演著服務注冊與發現的中心角色。
1. 核心功能
當一個微服務實例啟動時,它會將自己的網絡地址(IP和端口)、服務名稱、健康狀態等元數據注冊到注冊中心。其他服務(消費者)需要調用該服務時,無需硬編碼提供者的地址,只需向注冊中心查詢,即可獲取到當前所有可用服務實例的列表,從而實現動態的服務發現。
2. 主流產品
- Nacos:阿里巴巴開源的產品,集服務注冊發現與配置管理于一體,支持AP和CP模型,社區活躍。
- Eureka:Netflix開源,遵循AP原則,保證高可用性,但在2.x版本后已停止維護。
- Consul:HashiCorp公司推出,基于Raft協議保證強一致性(CP),內置了健康檢查、KV存儲等功能。
- Zookeeper:Apache項目,通過Zab協議保證強一致性(CP),常作為分布式協調服務,也可用于服務注冊。
3. 治理價值
注冊中心實現了服務位置的解耦,支持服務的水平擴容、故障實例的自動剔除(通過健康檢查)和優雅上下線,是構建彈性架構的前提。
二、配置管理:環境信息的“中央倉庫”
在微服務環境中,配置信息(如數據庫連接、功能開關、超時參數)分散在各個服務中,管理極其不便。配置管理中心應運而生。
1. 核心功能
它允許將所有微服務的配置信息集中存儲、統一管理。應用啟動時或運行時,可以從中心拉取配置,實現配置與代碼的分離。支持配置的動態刷新,修改配置后無需重啟服務即可生效。
2. 主流產品
- Nacos Config:與Nacos Service無縫集成,提供配置管理能力。
- Spring Cloud Config:Spring Cloud生態的原生方案,支持Git、SVN等存儲后端,需配合消息總線(如Spring Cloud Bus)實現動態刷新。
- Apollo:攜程開源,提供完善的權限管理、發布審核、灰度發布和監控功能,功能強大。
- Consul KV:利用Consul的Key-Value存儲功能實現配置管理。
3. 治理價值
實現了配置的版本化、審計和一致性管理。動態刷新能力使得調整系統行為(如修改熔斷閾值、日志級別)變得快速而安全,極大地提升了運維效率和系統的靈活性。
三、OpenFeign:聲明式的服務調用與客戶端治理
OpenFeign是Spring Cloud生態中一個基于注解的聲明式HTTP客戶端,它簡化了服務間的HTTP調用,并內置了豐富的客戶端治理能力。
1. 核心功能
開發者只需定義一個Java接口并添加注解(如@FeignClient(name = "service-name")),OpenFeign便能自動生成實現,完成從服務發現到HTTP請求的全部細節。它天然整合了Ribbon(負載均衡器)和Hystrix(熔斷器,現常被Resilience4j或Sentinel替代)。
2. 客戶端治理實踐
- 負載均衡:通過集成Ribbon或Spring Cloud LoadBalancer,自動將請求分發到注冊中心獲取的多個服務實例上,支持輪詢、隨機、權重等多種策略。
- 熔斷與降級:通過@FeignClient的fallback或fallbackFactory屬性指定熔斷后的降級邏輯,防止故障擴散,提升系統整體韌性。
- 請求超時與重試:可靈活配置連接超時、讀取超時以及重試策略,應對網絡波動和慢服務。
- 日志與監控:可以配置完整的請求/響應日志,便于調試和監控。配合Micrometer等指標庫,能暴露調用 metrics。
- 自定義攔截器:通過實現RequestInterceptor接口,可以統一添加認證頭、鏈路追蹤ID(如TraceId)等,實現切面治理。
四、協同工作:構建完整的治理閉環
在典型的Spring Cloud Alibaba或Spring Cloud Netflix體系中,這三者緊密協作,形成一個治理閉環:
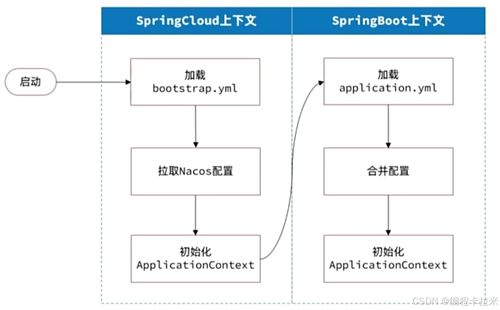
- 啟動與注冊:服務提供者啟動,從配置中心(如Nacos)拉取自身配置,然后向注冊中心(如Nacos)完成注冊。
- 發現與調用:服務消費者啟動,同樣拉取配置。當需要通過OpenFeign調用某個服務時,OpenFeign會向注冊中心查詢目標服務的實例列表。
- 負載均衡與容錯:OpenFeign內置的負載均衡器從實例列表中選取一個實例,發起HTTP請求。在此過程中,配置中心下發的超時、熔斷規則生效,實施客戶端治理。
- 動態調節:運維人員可以在配置中心動態修改某個服務的超時時間、熔斷規則或功能開關。配置變更通過長輪詢或消息機制推送到客戶端,OpenFeign能感知并應用新配置,實現運行時治理。
###
注冊中心、配置管理與OpenFeign共同構成了微服務治理的“鐵三角”。注冊中心解決了“服務在哪”的問題,配置中心解決了“參數如何”的問題,而OpenFeign則是在客戶端解決了“如何穩定、高效調用”的問題。將它們有機結合,并輔以完善的監控告警體系,才能確保微服務架構在規模不斷增長時,依然保持清晰、可控與堅韌,從而真正釋放微服務架構的潛力。在實際選型中,Nacos因其“一站式”的解決方案(同時提供注冊與配置功能)以及與Spring Cloud Alibaba生態的良好集成,正獲得越來越多的青睞。